Bem... era suposto ter feito este post há uns dias atrás mas mais vale tarde do que nunca (espero)!
No inicio da semana, conforme me foi pedido pelo professor Vitor, fiz um novo modulo de ROS para servir de intermédio entre a aquisição da força (ou outros sensores) e monitorização/comando do joystick háptico. Este modulo, com o nome haptic_force, tem a função de renderizar as forças a serem enviadas para o Phantom conforme os sensores instalados no robô.
Neste momento o único executável activo faz uma simples conversão de cada uma das coordenadas do COP para um vetor de força a 2D representado no Phantom no plano horizontal. A conversão é feita com uma equação da obtida pelo MatLab.

O gráfico acima mostra a recta que foi implementada para a componente y do COP. Os factores das rectas serão actualizados após a calibração das células de carga.
O modulo haptic_force poderá ser aumentado ou refeito conforme se utilizem mais sensores instalados no robô humanóide, como por exemplo sensores inerciais.
Após esta este modulo estar feito e testado, tal como falei no post anterior, estive a mexer com o robô!
(YYEESSS!!!!!)
Estive um dia a ver os trabalhos feitos anteriormente nomeadamente as funções e classes feitas para controlo dos servos. Depois de este estudo decidi pegar em algumas funções do trabalho do Eng. Pedro Cruz e fazer uma classe para controlar os servos do tronco e pernas.
Na quinta-feira recebi um email que dizia que as placas de circuito impresso estavam prontas. Obrigado Sr. Júlio! Aqui estão elas ao lado do Arduino Fio onde vão ser instaladas.

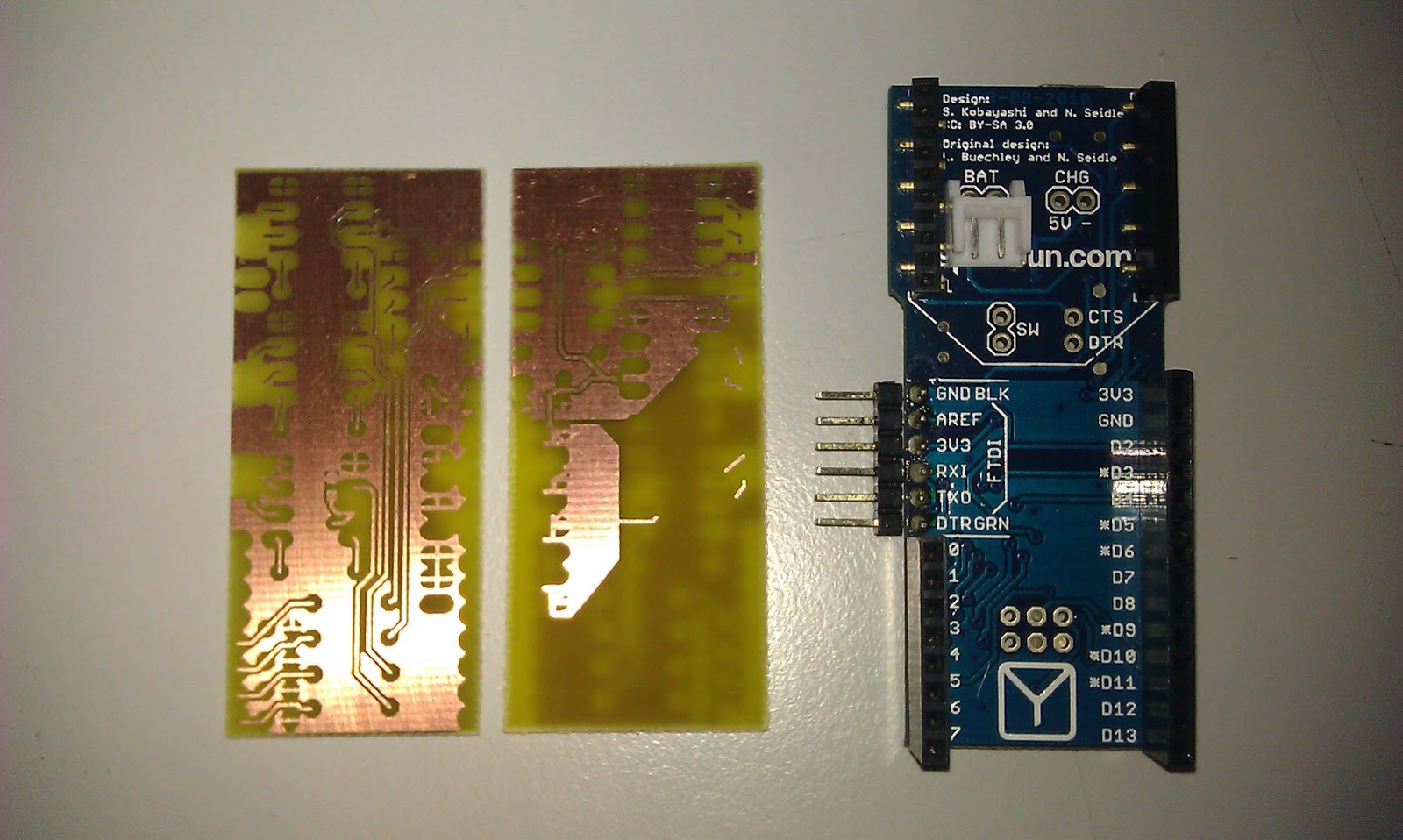
E agora é esta a minha prioridade: acabar o hardware! Fazer os 109 furos em cada placa e soldar todos os componentes. Depois disso é seguir para a máquina de ensaios uniaxial de tração/compressão para com as placas e amplificadores operacionais calibrar todas as células de carga.
Vamos a isso!


